混動動力總成發(fā)動機管理控制器軟件架構(gòu)設計與開發(fā)
隨著全球汽車產(chǎn)業(yè)向電氣化、智能化轉(zhuǎn)型,混合動力汽車(HEV/PHEV)憑借其在節(jié)能減排與續(xù)航里程間的卓越平衡,已成為當前市場的主流選擇之一。作為混合動力系統(tǒng)的“大腦”,發(fā)動機管理控制器(ECU)的軟件架構(gòu)設計與開發(fā)至關(guān)重要,它直接決定了整車的動力性、經(jīng)濟性、平順性及排放水平。本文將系統(tǒng)闡述混動動力總成發(fā)動機管理控制器軟件架構(gòu)的核心設計思想、關(guān)鍵模塊以及開發(fā)流程。
一、 軟件架構(gòu)設計的核心目標與挑戰(zhàn)
混動系統(tǒng)集成了內(nèi)燃機、電機、電池、變速箱等多個復雜子系統(tǒng),其ECU軟件架構(gòu)設計需實現(xiàn)以下核心目標:
- 功能整合與協(xié)同控制:無縫協(xié)調(diào)發(fā)動機啟停、扭矩分配(發(fā)動機 vs. 電機)、模式切換(純電、混動、充電等)、再生制動等復雜功能。
- 實時性與確定性:確保在毫秒級的時間內(nèi)完成傳感器數(shù)據(jù)采集、控制算法運算與執(zhí)行器驅(qū)動,滿足嚴格的車輛駕駛實時性要求。
- 安全性與可靠性:符合ISO 26262功能安全標準(ASIL C/D級常見),具備故障診斷、容錯處理及安全狀態(tài)轉(zhuǎn)換能力。
- 可擴展性與可維護性:平臺化設計,便于適應不同混動構(gòu)型(如P0-P4)、不同發(fā)動機型號以及未來功能升級(如OTA)。
- 資源優(yōu)化:在有限的計算與存儲資源內(nèi),高效運行復雜的控制策略。
主要挑戰(zhàn)在于多物理域耦合、多目標優(yōu)化(動力vs.經(jīng)濟vs.排放)、動態(tài)工作模式繁多以及嚴格的汽車電子開發(fā)標準。
二、 分層模塊化軟件架構(gòu)設計
現(xiàn)代混動ECU軟件普遍采用基于AUTOSAR(汽車開放系統(tǒng)架構(gòu))標準的分層模塊化設計,以實現(xiàn)軟硬件解耦與功能模塊化。典型架構(gòu)可分為以下四層:
1. 基礎軟件層(BSW)
- 微控制器抽象層(MCAL):提供對MCU硬件(如ADC、PWM、CAN控制器)的統(tǒng)一訪問接口。
- 服務層(Services):提供系統(tǒng)服務(如操作系統(tǒng)、內(nèi)存管理、診斷協(xié)議UDS/OBD)、通信服務(CAN、LIN、以太網(wǎng)協(xié)議棧)以及復雜驅(qū)動。
- 實時運行環(huán)境(RTE):作為應用層與基礎軟件層之間的“橋梁”,實現(xiàn)AUTOSAR組件間的通信,是軟件架構(gòu)的核心樞紐。
2. 應用層(Application Layer)
這是實現(xiàn)混動控制策略的核心,通常采用模塊化組件設計:
- 整車能量管理策略(VMS)模塊:頂層決策大腦。根據(jù)駕駛員需求(加速踏板、擋位)、電池狀態(tài)(SOC)、導航/路況信息等,實時計算整車需求扭矩,并決策最優(yōu)工作模式(如純電驅(qū)動、串聯(lián)充電、并聯(lián)驅(qū)動等)及發(fā)動機啟停指令。
- 發(fā)動機協(xié)同控制模塊:
- 扭矩協(xié)調(diào)與分配:接收VMS指令,動態(tài)分配發(fā)動機目標扭矩與電機目標扭矩,確保動力平滑銜接。
- 發(fā)動機智能啟停控制:實現(xiàn)快速、平穩(wěn)、低振動的發(fā)動機啟動與停機。
- 燃燒與排放控制:精確控制噴油、點火、節(jié)氣門、EGR等,在混動特定工況(如低負荷發(fā)電、急加速助力)下優(yōu)化效率與排放。
- 電機控制模塊:與電機控制器(MCU)協(xié)同,實現(xiàn)驅(qū)動、發(fā)電、轉(zhuǎn)矩補償?shù)裙δ堋?/li>
- 電池管理交互模塊:與電池管理系統(tǒng)(BMS)通信,獲取電池狀態(tài)邊界(最大充放電功率等),確保電池安全。
- 變速箱協(xié)調(diào)模塊:與變速箱控制單元(TCU)協(xié)同,在模式切換或換擋過程中協(xié)調(diào)扭矩,保證平順性。
- 熱管理集成模塊:協(xié)調(diào)發(fā)動機冷卻、電機冷卻、電池冷卻/加熱系統(tǒng),優(yōu)化整體熱效率。
- 診斷與故障處理模塊:實時監(jiān)控各子系統(tǒng)狀態(tài),實施故障診斷、分級處理(如點亮故障燈、限制功率、進入跛行回家模式)并存儲故障碼。
3. 復雜驅(qū)動層與硬件接口
處理特定傳感器(如曲軸/凸輪軸位置傳感器、爆震傳感器)信號和高速執(zhí)行器(如高壓噴油器、點火線圈)的精準定時驅(qū)動。
4. 操作系統(tǒng)層
采用符合OSEK/VDX或AUTOSAR OS標準的實時操作系統(tǒng)(RTOS),負責任務調(diào)度、中斷管理和資源保護,確保關(guān)鍵任務的實時性。
三、 核心軟件設計策略
- 基于模型的設計(MBD):控制算法(如VMS、扭矩分配)多在MATLAB/Simulink環(huán)境中進行模型搭建、仿真驗證和自動代碼生成(通過Embedded Coder等),提高開發(fā)效率與代碼可靠性。
- 狀態(tài)機設計:廣泛應用于模式管理(如駕駛模式、發(fā)動機狀態(tài))。明確定義各個狀態(tài)、轉(zhuǎn)換條件及輸出動作,確保系統(tǒng)行為清晰、可靠。
- 接口標準化與數(shù)據(jù)抽象:通過AUTOSAR接口(Sender-Receiver, Client-Server)或自定義標準數(shù)據(jù)接口,明確定義模塊間交互的數(shù)據(jù)和信號,降低耦合度。
- 時間觸發(fā)與事件觸發(fā)結(jié)合:關(guān)鍵周期性控制任務(如扭矩計算,10ms周期)由時間觸發(fā);非周期性事件(如模式切換請求、故障事件)由事件觸發(fā),通過中斷或任務間通信機制處理。
四、 軟件開發(fā)流程
遵循汽車行業(yè)通用的V模型開發(fā)流程,并與功能安全(ISO 26262)流程深度融合:
- 需求分析與系統(tǒng)設計:定義軟件功能需求、性能指標及安全目標。進行系統(tǒng)級和軟件級架構(gòu)設計。
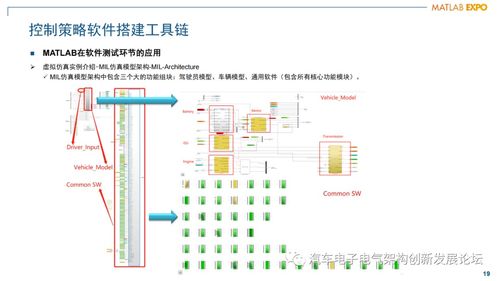
- 軟件詳細設計與建模:細化模塊設計,利用MBD工具進行算法模型開發(fā)與仿真驗證(MiL,模型在環(huán))。
- 軟件實現(xiàn)與集成:生成或手寫代碼,配置AUTOSAR基礎軟件,在專用集成環(huán)境(如EB tresos, Vector DaVinci)中完成應用軟件組件與RTE的集成。
- 驗證與確認:
- 軟件在環(huán)測試(SiL):測試生成代碼的功能。
- 處理器在環(huán)測試(PiL):在真實MCU或仿真器上測試代碼。
- 硬件在環(huán)測試(HiL):將ECU軟件加載到真實控制器或快速原型控制器中,與高保真的車輛模型和仿真硬件環(huán)境進行閉環(huán)測試,覆蓋全工況與故障注入。
- 臺架與實車測試:在發(fā)動機臺架、動力總成臺架及整車上進行最終標定與驗證。
- 標定與優(yōu)化:使用標定工具(如INCA, CANape)對軟件中的大量參數(shù)(如MAP圖、閾值、PID參數(shù))進行精細化調(diào)整,以優(yōu)化實際性能。
- 發(fā)布與維護:生成生產(chǎn)軟件,并建立持續(xù)的故障監(jiān)控與OTA升級能力。
五、 未來發(fā)展趨勢
未來軟件架構(gòu)將進一步向域集中式/整車集中式演進,發(fā)動機管理可能作為動力域控制器的一個功能集成其中。人工智能/機器學習算法將更深度地應用于能量管理策略優(yōu)化,SOA(面向服務架構(gòu)) 理念的引入將支持更靈活的功能部署與OTA更新。網(wǎng)絡安全(ISO/SAE 21434)也將成為架構(gòu)設計的必備要素。
結(jié)論
混動動力總成發(fā)動機管理控制器的軟件架構(gòu)是一個高度復雜、安全關(guān)鍵的系統(tǒng)工程。成功的設計依賴于清晰的分層架構(gòu)、模塊化的功能組件、遵循AUTOSAR等開放標準、緊密結(jié)合MBD開發(fā)方法以及嚴格的V模型開發(fā)與驗證流程。隨著技術(shù)演進,該軟件架構(gòu)將持續(xù)向更高度的集成化、智能化與網(wǎng)聯(lián)化方向發(fā)展,為混動汽車帶來更卓越的綜合性能。
如若轉(zhuǎn)載,請注明出處:http://www.sk53.cn/product/81.html
更新時間:2026-04-28 04:31:51